Next: Omografia e Rette Up: Elementi Previous: Stima delle rotazioni e
Le coordinate omogenee (sezione 1.4) permettono di rappresentare uno spettro molto ampio di trasformazioni unificando sotto lo stesso formalismo sia trasformazioni lineari (affini, rotazioni, traslazioni) che trasformazioni prospettiche.
Dati due piani distinti ![]() e
e ![]() si dice che essi sono riferiti a una trasformazione omografica (homographic transformation) quando esiste una corrispondenza biunivoca tale che:
si dice che essi sono riferiti a una trasformazione omografica (homographic transformation) quando esiste una corrispondenza biunivoca tale che:
Sia il piano ![]() osservato da due viste differenti. Nello spazio
osservato da due viste differenti. Nello spazio
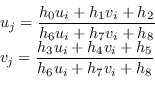
![]() l'omografia (la trasformazione omografica) è rappresentata da equazioni del tipo:
l'omografia (la trasformazione omografica) è rappresentata da equazioni del tipo:
Per la sua particolare forma tale trasformazione è descrivibile attraverso una trasformazione lineare usando le coordinate omogenee (sezione 1.4):
Viene definita matrice omografica
![]() la matrice che converte punti omogenei
la matrice che converte punti omogenei ![]() appartenenti al piano
appartenenti al piano ![]() della immagine
della immagine ![]() in punti
in punti ![]() omogenei dell'immagine
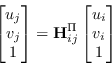
omogenei dell'immagine ![]() con la relazione
con la relazione
Essendo una relazione tra grandezze omogenee il sistema è definito a meno di un fattore moltiplicativo: qualunque multiplo dei parametri della matrice omografica definisce la medesima trasformazione perché qualunque multiplo dei vettori di ingresso o uscita soddisfa ugualmente la relazione (1.75).
Come conseguenza di ciò i gradi di libertà del problema non sono 9, come in una generica trasformazione affine in
![]() , ma 8 in quanto è sempre possibile fissare un vincolo aggiuntivo sugli elementi della matrice.
Esempi di vincoli usati spesso sono
, ma 8 in quanto è sempre possibile fissare un vincolo aggiuntivo sugli elementi della matrice.
Esempi di vincoli usati spesso sono ![]() o
o
![]() .
È da notare che
.
È da notare che ![]() non è generalmente un vincolo ottimo dal punto di vista computazionale in quanto l'ordine di grandezza che assume
non è generalmente un vincolo ottimo dal punto di vista computazionale in quanto l'ordine di grandezza che assume ![]() può essere molto diverso da quello degli altri elementi della matrice stessa e potrebbe generare singolarità, oltre al caso limite in cui
può essere molto diverso da quello degli altri elementi della matrice stessa e potrebbe generare singolarità, oltre al caso limite in cui ![]() potrebbe essere zero.
Il vincolo alternativo
potrebbe essere zero.
Il vincolo alternativo
![]() , soddisfatto gratuitamente dell'uso di risolutori basati su fattorizzazioni SVD o QR, è invece computazionalmente ottimo.
, soddisfatto gratuitamente dell'uso di risolutori basati su fattorizzazioni SVD o QR, è invece computazionalmente ottimo.
 |

|
Le applicazioni che coinvolgono trasformazioni omografiche sono molteplici. Verranno in dettaglio affrontante nel capitolo 8 della camera pin-hole, ma in sintesi tali trasformazioni permettono la rimozione della prospettiva da piani in immagine, la proiezione di piani in prospettiva e associare i punti di piani osservati da punti di vista differenti. Un modo per ottenere delle trasformazioni prospettiche è mettere in relazione punti tra i piani che si vogliono trasformare e determinare in questo modo i parametri della matrice omografica (1.75) anche in maniera sovradimensionata, per esempio attraverso il metodo dei minimi quadrati. Un modo per ricavare i coefficienti sarà mostrato nell'equazione (8.52). Va ricordato che tale trasformazione, che lega punti di piani tra due viste prospettiche, vale solo e solamente per i punti dei piani considerati: l'omografia mette in relazione punti di piani tra loro, ma solo quelli. Qualsiasi punto non appartenente al piano verrà riproiettato in una posizione errata.
È facile vedere che ogni omografia è sempre invertibile e l'inversa della trasformazione è una trasformazione omografica anche essa:
| (1.79) |
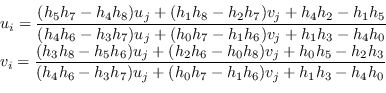
Una possibile forma per l'inversa dell'omografia (1.75) è
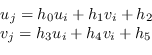
È da segnalare che quando i due piani messi in relazione sono paralleli, allora
![]() , la trasformazione omografica si riduce ad una trasformazione affine (affine transformation) rappresentata dalle classiche equazioni
, la trasformazione omografica si riduce ad una trasformazione affine (affine transformation) rappresentata dalle classiche equazioni