Next: Il Maximum Likelihood estimator Up: Elementi di Statistica Previous: Propagazione dell'errore attraverso statistiche
Nella sezione 2.6 e seguenti si è discusso di come il rumore si propaghi attraverso trasformazioni lineare e non lineari.
In questa sezione invece si studia il caso complementare dove è conosciuta la stima del rumore sulla variabile in uscita dal sistema lineare mentre si vuole sapere la stima del rumore sulle variabili in ingresso ovvero la bontà con cui si è ottenuta la soluzione di un sistema lineare. Per buona parte di questa sezione si fa riferimento alla teoria discussa in sezione 1.1 e ne è di fatto la continuazione, per integrarla poi, con nella sezione 3.5 al discorso più generale di regressione a modelli non lineari.
Sia pertanto
Una perturbazione
![]() sulla colonna dei termini noti (osservazioni,uscite), in
sulla colonna dei termini noti (osservazioni,uscite), in
| (2.48) |
Un indice interessante consiste nel calcolare la norma dell'errore in relazione al valore atteso.
Tale relazione vale
 |
(2.49) |
Estendiamo ora l'analisi al caso in cui il sistema sia un sistema lineare sovradimensionato. A questo scopo è possibile ricavare il condizionamento di una matrice usando un'ulteriore proprietà della decomposizione SVD.
Sia
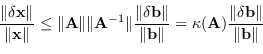
Riassumendo il condizionamento ha le seguenti importanti proprietà:
Come è stato fatto notare nella sezione 1.1, la soluzione alle equazioni perpendicolari tende invece ad amplificare gli errori rispetto a soluzioni alternative.
È facile dimostrare infatti che in questo caso
| (2.52) |