Next: Angoli di Eulero Up: Matrici di Rotazione Previous: Matrici di Rotazione
Un modo per definire la matrice di rotazione in 3 dimensioni consiste nel comporre tra loro rotazioni rispetto ai 3 assi principali del sistema di riferimento.
Definiamo ![]() l'angolo di beccheggio pitch,
l'angolo di beccheggio pitch, ![]() l'angolo di imbardata yaw e
l'angolo di imbardata yaw e ![]() l'angolo di rollio roll, angoli di orientazione del sensore rispetto al sistema di riferimento mondoA.3
Tali angoli e tale nomenclatura sono definiti come Tait-Bryan Angles, Cardan Angles (da Girolamo Cardano) o nautical angles.
l'angolo di rollio roll, angoli di orientazione del sensore rispetto al sistema di riferimento mondoA.3
Tali angoli e tale nomenclatura sono definiti come Tait-Bryan Angles, Cardan Angles (da Girolamo Cardano) o nautical angles.
Di seguito saranno mostrate le matrici (come riferimento per esempio (LaV06)) che convertono un vettore da coordinate sensore a coordinate mondo attraverso angoli che rappresentano l'orientazione del sensore rispetto al mondo stesso e sono le medesime matrici che ruotano un vettore in senso antiorario (counterclockwise rotation of axes) rispetto ai vari assi del sistema di riferimento.
Gli assi di tale sistema di riferimento sono quelli mostrati in figura 8.4. Si faccia comunque attenzione perché per i veicoli terrestri e per le navi viene prediletto un sistema di riferimento diverso da quelli aeronautico.
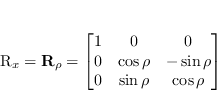
La matrice di rotazione dell'angolo roll ![]() (asse X):
(asse X):
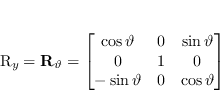
La matrice di rotazione dell'angolo pitch ![]() (asse Y):
(asse Y):
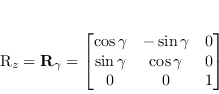
La matrice di rotazione dell'angolo yaw ![]() (asse Z):
(asse Z):
Come si è detto nella sezione precedente, la composizione di rotazioni non è commutativa ed è necessario fare una scelta.
In campo aeronautico viene suggerita come convenzione Roll-Pitch-Yaw (RPY).
Sotto questa particolare convenzione la matrice di cambiamento di base (alias) si costruisce come
![]() A.4 ovvero, eseguendo le moltiplicazioni,
A.4 ovvero, eseguendo le moltiplicazioni,
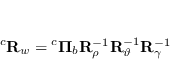
Nel caso specifico in cui il sensore fosse una camera pin-hole, usando questa convenzione e considerando l'equazione (A.5), la matrice di rotazione
![]() della camera pin-hole che converte da coordinate “mondo” Front-Left-Up a coordinate “camera”, si può esprimere come prodotto di
della camera pin-hole che converte da coordinate “mondo” Front-Left-Up a coordinate “camera”, si può esprimere come prodotto di
Va ribadito che la matrice
![]() , espressa come nella formula (A.10), è la matrice che “rimuove” la rotazione di un sensore avete quei particolari angoli di posizionamento e pertanto trasforma da coordinate “mondo” a coordinate “camera” mentre normalmente in letteratura si tende a indicare come matrice di rotazione quella matrice che converte da coordinate “sensore” a coordinate “mondo”.
, espressa come nella formula (A.10), è la matrice che “rimuove” la rotazione di un sensore avete quei particolari angoli di posizionamento e pertanto trasforma da coordinate “mondo” a coordinate “camera” mentre normalmente in letteratura si tende a indicare come matrice di rotazione quella matrice che converte da coordinate “sensore” a coordinate “mondo”.
È interessante notare che da un punto di vista puramente grafico, le colonne della matrice inversa/trasposta della matrice (A.11), la quale, quest'ultima, permette di trasformare punti da coordinate camera a coordinate mondo, permettono facilmente di disegnare gli assi e così rappresentare graficamente l'orientazione della camera.
 . Per creare ulteriore confusione la sequenza x-y'-z” è conosciuta come Roll-Pitch-Yaw (o Roll-Pitch-Yaw XYZ), mentre la sequenza z-y'-x” (intrinseca) è comunemente conosciuta come Yaw-Pitch-Roll (o Roll-Pitch-Yaw ZYX).
. Per creare ulteriore confusione la sequenza x-y'-z” è conosciuta come Roll-Pitch-Yaw (o Roll-Pitch-Yaw XYZ), mentre la sequenza z-y'-x” (intrinseca) è comunemente conosciuta come Yaw-Pitch-Roll (o Roll-Pitch-Yaw ZYX).