Next: Filtro di Kalman Sigma-Point Up: Filtri Bayesiani Previous: Rumore correlato
Il filtro di Kalman esteso Extended Kalman Filter (EKF) è una versione non-lineare del filtro di Kalman usata quando l'evoluzione o l'osservazione dello stato del sistema sono non-lineari.
Un sistema non lineare a tempo discreto, formato dall'evoluzione dello stato e dalla sua osservazione, può essere scritto in forma generalizzata come
 |
(2.117) |
Per poter essere applicato, EKF richiede il calcolo degli Jacobiani sia di ![]() che di
che di ![]() .
Applicando la teoria mostrata nella sezione 2.6 sulla propagazione dell'incertezza in funzioni non lineari, attraverso le matrici delle derivate è possibile sfruttare le stesse formulazioni matematiche fatte per il caso di Kalman lineare su funzioni non-lineari usando come matrici
.
Applicando la teoria mostrata nella sezione 2.6 sulla propagazione dell'incertezza in funzioni non lineari, attraverso le matrici delle derivate è possibile sfruttare le stesse formulazioni matematiche fatte per il caso di Kalman lineare su funzioni non-lineari usando come matrici
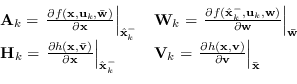 |
(2.118) |
Rispetto a Kalman lineare, la versione EKF risulta una scelta sub-ottima come stimatore ma comunque ampiamente accettata e usata in applicazioni pratiche. Il filtro di Kalman esteso, per sua costruzione, raggiunge solo una precisione di primo ordine ma permette comunque risultati vicini all'ottimo nel caso di funzionamento del filtro in punti in cui le derivate seconde sono nulle.
Paolo medici