Next: Filtro di Kalman Esteso Up: Filtri Bayesiani Previous: Filtro di Kalman
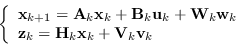
Nel caso in cui il rumore non sia semplicemente additivo, ma si propaghi nel sistema attraverso una trasformazione comunque lineare, il sistema di Kalman si generalizza in
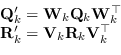
È possibile in questo caso applicare le stesse equazioni del sistema di Kalman introducendo le sostituzioni
 |
(2.116) |
Tale risultato tornerà utile nella sezione seguente sul filtro di Kalman esteso.
Chiaramente se le matrici ![]() e
e ![]() sono delle identità, ovvero il rumore è semplicemente additivo, la forma si semplifica e ridiventa quella vista in precedenza.
sono delle identità, ovvero il rumore è semplicemente additivo, la forma si semplifica e ridiventa quella vista in precedenza.