Next: RANSAC Up: Metodi di Regressione e Previous: Black-Rangarajan duality
 |
Sia
![]() una varietà continua in
una varietà continua in ![]() di cui è richiesto stimare i parametri
di cui è richiesto stimare i parametri
![]() .
Per ricavare tali parametri e poter definire completamente la funzione, sono disponibili un insieme di coordinate
.
Per ricavare tali parametri e poter definire completamente la funzione, sono disponibili un insieme di coordinate
![]() che appartengono al luogo dei punti della funzione, potenzialmente affetti da rumore ma sopratutto potenzialmente outlier.
che appartengono al luogo dei punti della funzione, potenzialmente affetti da rumore ma sopratutto potenzialmente outlier.
La trasformata di Hough (Hough Transform) è una tecnica che permette di raggruppare un insieme “molto probabile” di punti che soddisfano alcuni vincoli parametrici (PIK92).
Per ogni possibile punto
![]() nello spazio dei parametri è possibile associare un voto
nello spazio dei parametri è possibile associare un voto
![]() del tipo
del tipo
Sia ora la funzione
![]() un indice di verosimiglianza tra la coppia
un indice di verosimiglianza tra la coppia
![]() e il vincolo espresso da
e il vincolo espresso da
![]() .
La funzione
.
La funzione ![]() normalmente è una funzione binaria, ma generalizzando può rappresentare tranquillamente una probabilità.
Attraverso la funzione
normalmente è una funzione binaria, ma generalizzando può rappresentare tranquillamente una probabilità.
Attraverso la funzione ![]() è possibile costruire la trasformata di Hough
è possibile costruire la trasformata di Hough
![]() in maniera incrementale attraverso
in maniera incrementale attraverso
Per particolari vincoli è possibile semplificare ulteriormente quest'approccio, in modo da ridurre il peso computazionale e l'utilizzo della memoria.
Siano pertanto
![]() parametri da stimare, quantizzabili e limitati, e siano
parametri da stimare, quantizzabili e limitati, e siano ![]() e
e ![]() una funzione e un parametro tali che si possa scrivere la funzione
una funzione e un parametro tali che si possa scrivere la funzione
![]() come
come
In questo modo è possibile generare una mappa n-dimensionale di probabilità usando osservazioni ![]() affette da rumore e potenzialmente outliers.
Allo stesso modo il metodo di Hough permette di stimare un modello in presenza di una mistura di modelli con parametri differenti.
affette da rumore e potenzialmente outliers.
Allo stesso modo il metodo di Hough permette di stimare un modello in presenza di una mistura di modelli con parametri differenti.
Il metodo di Hough permette prestazioni via via migliori man mano che il numero di vincoli aumenta, limitando dinamicamente per esempio il campo dei parametri associati al campione ![]() .
L'algoritmo di Hough può essere visto come una forma degenere di template matching.
.
L'algoritmo di Hough può essere visto come una forma degenere di template matching.
Normalmente risulta interessante l'uso di Hough dove il modello ha solo 2 parametri in quanto facilmente graficabile su una mappa bidimensionale.
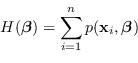
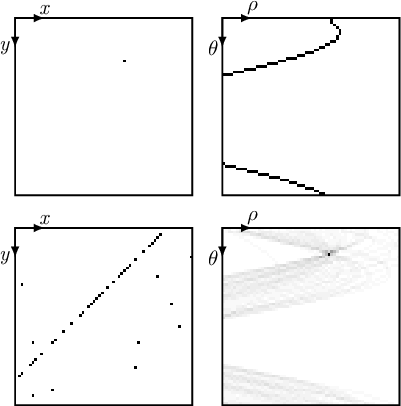
Un esempio molto comune della trasformata di Hough è quello dove ![]() (il modello) è una retta, espressa in forma polare come in equazione (1.46), dove i parametri da ricavare sono
(il modello) è una retta, espressa in forma polare come in equazione (1.46), dove i parametri da ricavare sono ![]() e
e ![]() :
risulta evidente che per ogni coppia di punti
:
risulta evidente che per ogni coppia di punti ![]() e per tutti i possibili angoli di
e per tutti i possibili angoli di ![]() quantizzati e limitati (in quanto angolo è un parametro limitato) esiste uno e un solo
quantizzati e limitati (in quanto angolo è un parametro limitato) esiste uno e un solo ![]() che soddisfa l'equazione (1.46).
che soddisfa l'equazione (1.46).
È pertanto possibile creare mappa
![]() dove per ogni punto
dove per ogni punto ![]() e per ogni
e per ogni
![]() viene incrementata sulla mappa accumulatore l'elemento associato a
viene incrementata sulla mappa accumulatore l'elemento associato a
![]() , relazione che soddisfa l'equazione (1.46) della retta scritta sotto forma di coordinate polari.
, relazione che soddisfa l'equazione (1.46) della retta scritta sotto forma di coordinate polari.
Paolo medici